I. Sistemsuperrigardo
1. Projekta Fono
En la lastaj jaroj, kontraŭleĝa transportado de ŝoseaj ŝarĝveturiloj fariĝis grava problemo, kiu endanĝerigas la nacian trafiksekurecon. Ĝi troŝarĝas ŝoseojn kaj pontojn, multe mallongigante la servodaŭron de vojoj kaj pontoj; samtempe, la sekurecfaktoro de veturiloj multe malpliiĝas, konstante kaŭzante trafikakcidentojn; ankaŭ facile kaŭzas trafikŝtopiĝon kaj median poluadon.
Registaroj je ĉiuj niveloj tra la lando senĉese pliigis siajn klopodojn por kontroli la troŝarĝitan transportadon de aŭtovojaj veturiloj kaj atingis gravajn laŭgradajn rezultojn. Tamen, pro kompleksaj sociaj kaj ekonomiaj faktoroj, la nacia situacio pri troŝarĝa detekto ankoraŭ estas tre severa, kaj la kaŝitaj danĝeroj de resalto ne estas eliminitaj; la firmigo de la rezultoj de la regado kaj la kontinua antaŭenigo de la laboro pri troŝarĝa detekto ankoraŭ estas sub granda premo. Tial, la regado de troŝarĝa transportado de veturiloj estas longdaŭra kaj ĉiutaga laboro, kiun oni devas persisti. Estas grave integri la regadon de troŝarĝa laboro en longdaŭran mekanismon. Ĝi ankaŭ ludas juran malinstigadan rolon rilate al troŝarĝitaj veturiloj, kaj ankaŭ povas vastigi siajn funkciojn por igi ĝin vojinspektado, subpremi la hazardan pensmanieron de kontraŭleĝaj transportoperacioj, kaj ĝustatempe kontroli kaj elimini diversajn kontraŭleĝajn transportoperaciojn, inkluzive de troŝarĝa transportado.
2. Enkonduko al la peza sistemo
La pesa principo de statika kamionpesilo estas parkigi ĉiujn veturilojn sur la pesplatformo por pezi la tutan veturilon. Ĝi havas altan pezan precizecon kaj klarajn naciajn normojn. Tamen, konvencia kamionpesilo povas nur akiri la pezon de la tuta veturilo, sed ne la aksan pezon. Ĝi povas taksi ĉu la tuta veturilo estas troŝarĝita, sed ne povas taksi ĉu la aksa pezo estas troŝarĝita. Ĝi ne povas plenumi la postulojn de la vojadministracia departemento por atingi la celon administri troŝarĝitan transportadon.
Ĉi tiu plano kombinas la jarojn da sperto de nia kompanio en la dizajnado kaj fabrikado de troŝarĝa detektila ekipaĵo kaj ĝian faktan aplikon en diversaj regionoj de la lando, zorge studas la uzon de diversaj troŝarĝaj detektilaj ekipaĵoj sur la merkato, kaj amplekse konsideras la specifajn bezonojn de ŝoseaj administradaj departementoj por troŝarĝa transportado. Ĝi adoptas altnivelan teknologion kaj unikajn dezajnajn ideojn por disvolvi dinamikan altprecizan veturilpezon kaj aksospecan detektan sistemon. Ĝi povas pezi kaj la aksopezon kaj la totalan pezon, kaj povas distingi la aksospecojn. La precizeco de la aksopezo ankaŭ povas esti multe plibonigita.
2. Konsisto de troŝarĝa kaj trolima sistemo
1. Sistemfunkcioj
Ĝi povas pezi veturilojn pasantajn je malalta rapideco kaj aŭtomate determini ĉu la veturilpezo aŭ aksopezo estas troŝarĝita;
Ĝi povas detekti la nombron de aksoj, aksogrupon, aksopezon kaj veturilpezon de la veturilo;
Ĝi povas formi kompletajn informojn pri veturila pezo, inkluzive de aksotipo, aksopezo, aksogrupo kaj totala pezo;
Ĝi povas sendi pezajn informojn al la komputilo per la dateninterfaco;
La kerna parto de la sistemo adoptas maturan kaj fidindan ekipaĵon, ĉiuj el kiuj adoptas modulan dezajnon, facile bonteneblan kaj vastigeblan, certigante la altan fidindecon de la sistemo.
La sistemprogramaro estas matura, tre fidinda, la datumoj estas kompletaj kaj efikaj, kaj ili povas esti plene kundividitaj, efike plibonigante laborefikecon kaj plej bone eliminante diversajn administradajn kaŝpasejojn.
2. Sistemprocezo
La kamiono estas enkondukita en la pesilvojon de la troŝarĝa stacio, kaj la numerplata rekona sistemo identigas la numerplaton;
La pneŭo- (akso-) identigilo distingas la nombron de aksoj, kaj la veturila pesadsistemo komencas pezi, determini la aksogrupon kaj kalkuli la aksopezon.
Kiam ĉiuj veturiloj pasas tra la veturila apartigilo kaj eniras la pesplatformon, kaj la pesilo estas en relative ekvilibra stato, la tuta pezo de la veturilo estas registrita kaj la aksopezo estas akirita.
La pezosistemo sendas pezajn informojn (numernumeron, nombron de aksoj, aksopezon, totalan veturilpezon, ktp.) al la detekta komputilo. La komputilo determinas ĉu ĝi estas trolimita kaj montras la detektajn informojn kiel veturilpezon, trolimon kaj troliman indicon sur la ekrano.
Post kiam la veturilo kompletigas la koncernajn operaciojn, la veturilgvidisto ellasas la ne-tro-limigitajn veturilojn por forlasi la detektareon laŭ la informoj sur la ekrano, gvidas la tro-limigitajn veturilojn por eniri la stacian areon por prilaborado, presas la tro-limigitan veturilinspektan formularon, kaj plenumas koncernajn ŝargajn operaciojn;
3. Sistemkonsisto kaj aranĝoplano
3.1 Sistemkonsisto
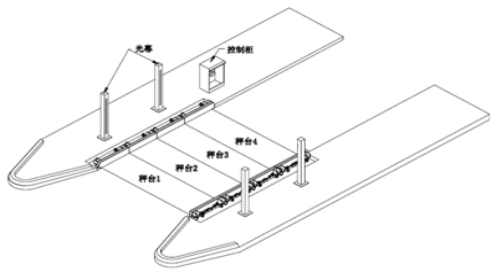
La sistemo por trolimo kaj troŝarĝo konsistas el kvar-tabla dinamika aksa pesilo de ZDG, kontrolinstrumento, infraruĝa veturilapartigilo, aksoidentigilo por rado de pezplatformo, kontrolŝranko (laŭvola ekipaĵo: numerplata rekona sistemo, LED-grandekrana sistemo, voĉa informsistemo, veturilgvidsistemo, industria komputilo, biletprintilo, seninterrompa elektroprovizo de UPS, programaro por trolimo kaj troŝarĝo, monitora sistemo) kaj aliaj akcesoraĵoj kaj kabloj.
3.2 Diagramo de la sistemo kiel montrite:
Laborfluo:
1) Veturiloj eniras la lenon sinsekve konservante sekuran distancon, aktivigante la infraruĝan veturilan apartigilon;
2) Ĉiu akso de la veturilo pasas tra la plursurfaca pesplatformo;
3) La ekranregilo prilaboras la pezan signalon ricevitan de la sensilo de la pesplatformo kaj la signalon de la radsensilo, apartigas la akson laŭ la logikaj kondiĉoj, kaj efike traktas specialajn situaciojn;
4) La malantaŭo de la veturilo forlasas la plursurfacan pesplatformon kaj la infraruĝan veturilan apartigilon;
5) La ekranregilo amplekse taksas la veturilan finsignalon surbaze de la okluzia signalo detektita de la infraruĝa veturila apartigilo kaj la peza signalo akirita de la peza sensilo;
6) La ekranregilo prilaboras la pezosignalon ricevitan kiam la supre menciita veturilo pasas tra la pezoplatformo;
7) La ekranregilo formas kompletan pezan informon de la tuta veturilo, kaj la kompleta peza informo inkluzivas veturilrapidon, aksotipon, aksopezon, pezon de aksogrupo, totalan pezon, ktp.;
8) Kompletigu la pesadon de unu veturilo kaj atendu la pesadon de la sekva veturilo
9) Dum la tuta laborprocezo, la sistemo aŭtomate traktas diversajn specialajn situaciojn, kiel ekzemple plena eniro kaj plena eliro, ripetata eniro kaj eliro, kaj longa restado sur la pesilo-platformo;
La sistemo povas aŭtomate kaj efike pritrakti la jenan veturilsituacion, kaj la jena veturilpesado ne havas efikon sur la precizecon de la datumoj.

Afiŝtempo: 20-a de februaro 2025